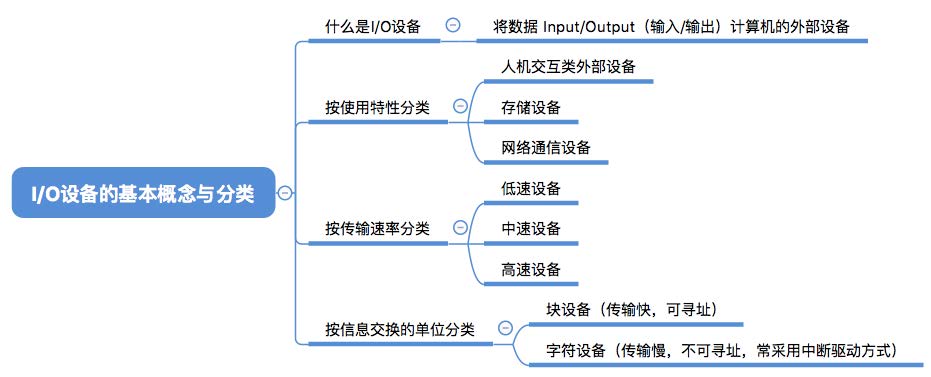
1. I/O管理概述
2. 磁盘存储器的管理
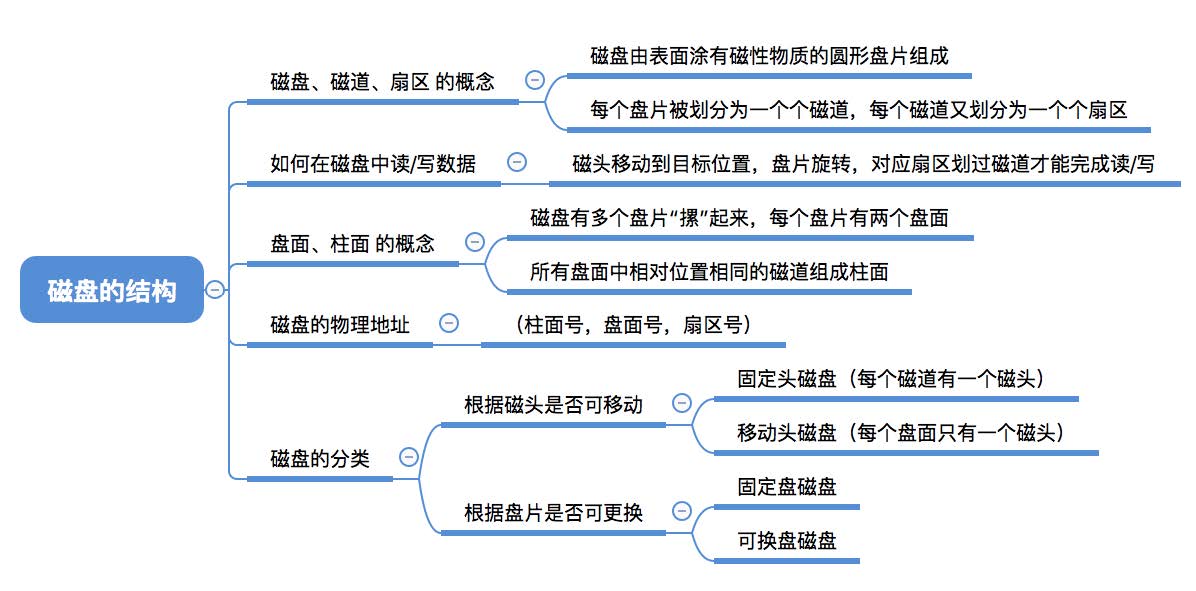
2.1 磁盘结构
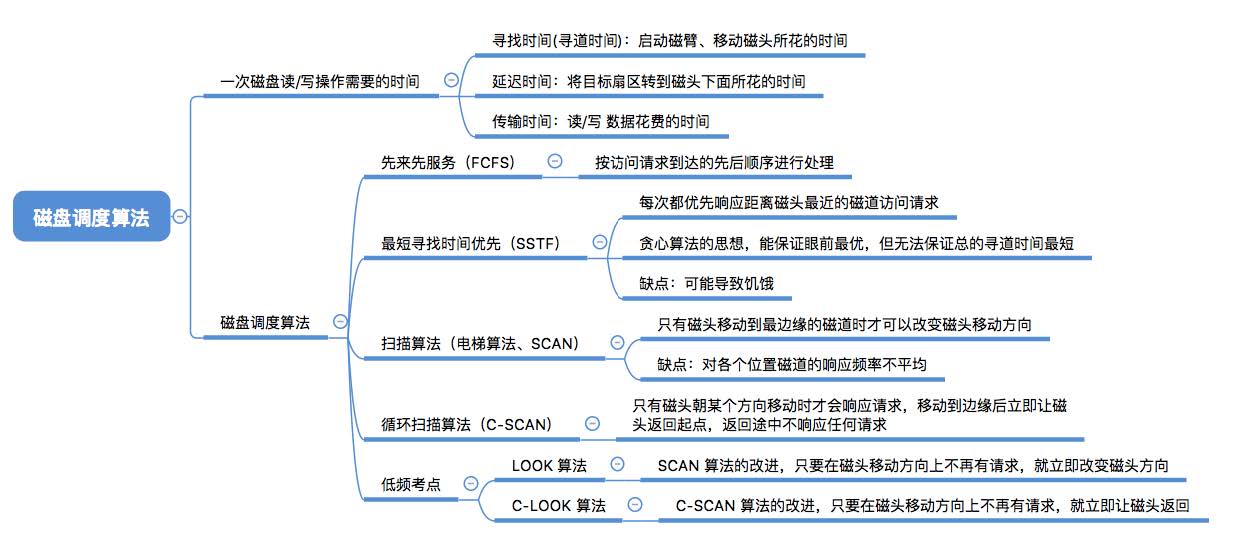
2.2 磁盘调度算法
2.2.1 先来先服务算法(FCFS)
根据进程请求访问磁盘的先后顺序进行调度。
假设磁头的初始位置是100号磁道,有多个进程先后陆续地请求访问 55、58、39、18、90、160、 150、38、184 号磁道
按照 FCFS 的规则,按照请求到达的顺序,磁头需要依次移动到 55、58、39、18、90、160、150、 38、184 号磁道
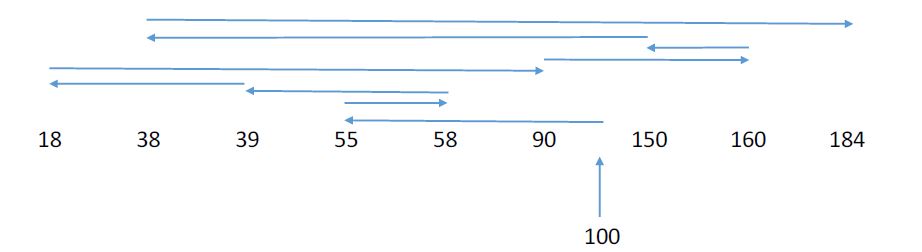
磁头总共移动了 45+3+19+21+72+70+10+112+146 = 498 个磁道
响应一个请求平均需要移动 498/9 = 55.3 个磁道(平均寻找长度)
优点:公平:如果请求访问的磁道比较集中的话,算法性能还算过的去
缺点:如果有大量进程竞争使用磁盘,请求访问的磁道很分散,则FCFS在性能上很差,寻道时间长。
2.2.2 最短寻找时间优先(SSTF)
SSTF 算法会优先处理的磁道是与当前磁头最近的磁道。可以保证每次的寻道时间最短,但是并不能保证总的寻道时间最短。(其实就是贪心算法的思想,只是选择眼前最优,但是总体未必最优)
假设磁头的初始位置是100号磁道,有多个进程先后陆续地请求访问 55、58、39、18、90、160、 150、38、184 号磁道
磁头总共移动了 (100-18) + (184-18) = 248 个磁道
响应一个请求平均需要移动 248/9 = 27.5 个磁道(平均寻找长度)
优点:性能较好,平均寻道时间短
缺点:可能产生“饥饿”现象
Eg:本例中,如果在处理18号磁道的访问请求时又来了一个38号磁道的访问请求,处理38号磁道的访问请求时又来了一个18号磁道的访问请求。如果有源源不断的18号、38号磁道的访问请求到来的话,150、160、184号磁道的访问请求就永远得不到满足,从而产生“饥饿”现象。
2.2.3 扫描算法(SCAN)
SSTF 算法会产生饥饿的原因在于:磁头有可能在一个小区域内来回来去地移动。为了防止这个问题,可以规定,只有磁头移动到最外侧磁道的时候才能往内移动,移动到最内侧磁道的时候才能往外移动。这就是扫描算法(SCAN)的思想。由于磁头移动的方式很像电梯,因此也叫电梯算法。
假设某磁盘的磁道为 0~200号,磁头的初始位置是100号磁道,且此时磁头正在往磁道号增大的方向移动,有多个进程先后陆续地请求访问 55、58、39、18、90、160、150、38、184 号磁道

磁头总共移动了 (200-100) + (200-18) = 282 个磁道
响应一个请求平均需要移动 282/9 = 31.3 个磁道(平均寻找长度)
优点:性能较好,平均寻道时间较短,不会产生饥饿现象
缺点:
①只有到达最边上的磁道时才能改变磁头移动方向,事实上,处理了184号磁道的访问请 求之后就不需要再往右移动磁头了。
②SCAN算法对于各个位置磁道的响应频率不平均(如:假设此时磁头正在往右移动,且刚处理过90号磁道,那么下次处理90号磁道的请求就需要等磁头移动很长一段距离:而响应了184号磁道的请求之后,很快又可以再次响应 184 号磁道的请求了)
2.2.4 look调度算法
扫描算法(SCAN)中,只有到达最边上的磁道时才能改变磁头移动方向,事实上,处理了184号磁道的访问请求之后就不需要再往右移动磁头了。LOOK调度算法就是为了解决这个问题,如果在磁头移动方向上己经没有别的请求,就可以立即改变磁头移动方向。(边移动边观察,因此叫 LOOK)
假设某磁盘的磁道为 0~200号,磁头的初始位置是100号磁道,且此时磁头正在往磁道号增大的方向 移动,有多个进程先后陆续地请求访问 55、58、39、18、90、160、150、38、184 号磁道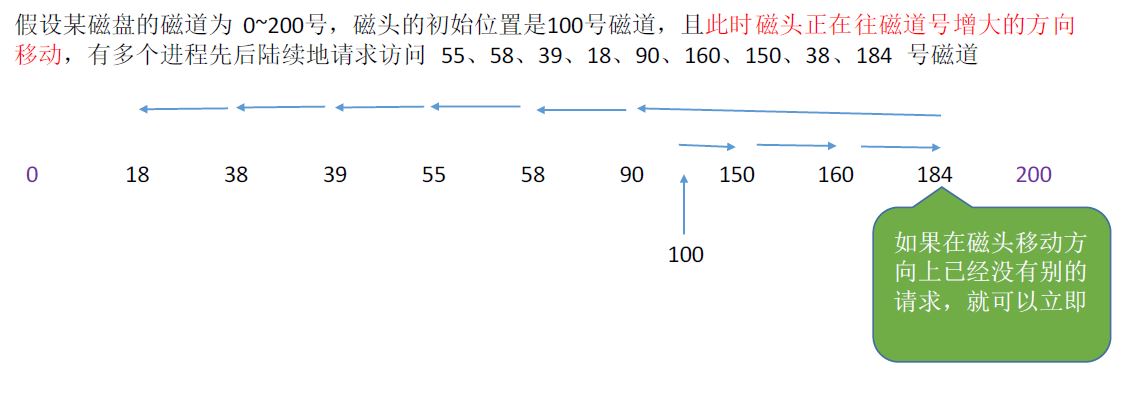
磁头总共移动了 (184-100) + (184-18) = 250 个磁道 响应一个请求平均需要移动 250/9 = 27.5 个磁道(平均寻找长度)
优点:比起SCAN算法来,不需要每次都移动到最外侧或最内侧才改变磁头方向,使寻道时间进一步缩短
2.2.5 循环扫描算法(C-SCAN)
SCAN算法对于各个位置磁道的响应频率不平均,而C-SCAN算法就是为了解决这个问题。规定只有磁头朝某个特定方向移动时才处理磁道访问请求,而返回时直接快速移动至起始端而不处理任何请求。
假设某磁盘的磁道为 0~200号,磁头的初始位置是100号磁道,且此时磁头正在往磁道号增大的方向 移动,有多个进程先后陆续地请求访问 55、58、39、18、90、160、150、38、184 号磁道
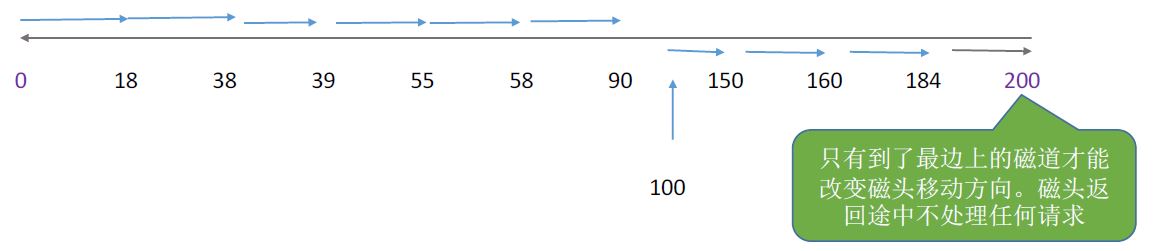
磁头总共移动了 (200-100) + (200-0) + (90-0)= 390 个磁道
响应一个请求平均需要移动 390/9 = 43.3 个磁道(平均寻找长度)
优点:比起SCAN 来,对于各个位置磁道的响应频率很平均。
缺点:只有到达最边上的磁道时才能改变磁头移动方向,事实上,处理了184号磁道的访问请求 之后就不需要再往右移动磁头了;并且,磁头返回时其实只需要返回到18号磁道即可,不需要返
回到最边缘的磁道。另外,比起SCAN算法来,平均寻道时间更长。
2.2.6 C-LOOK调度算法
C-SCAN 算法的主要缺点是只有到达最边上的磁道时才能改变磁头移动方向,并且磁头返回时不一定需要返回到最边缘的磁道上。C-LOOK 算法就是为了解决这个问题。如果磁头移动的方向上己经没有磁道访问请求了,就可以立即让磁头返回,并且磁头只需要返回到有磁道访问请求的位置即可。
假设某磁盘的磁道为0~200号,磁头的初始位置是100号磁道,且此时磁头正在往磁道号增大的方向 移动,有多个进程先后陆续地请求访问 55、58、39、18、90、160、150、38、184 号磁道
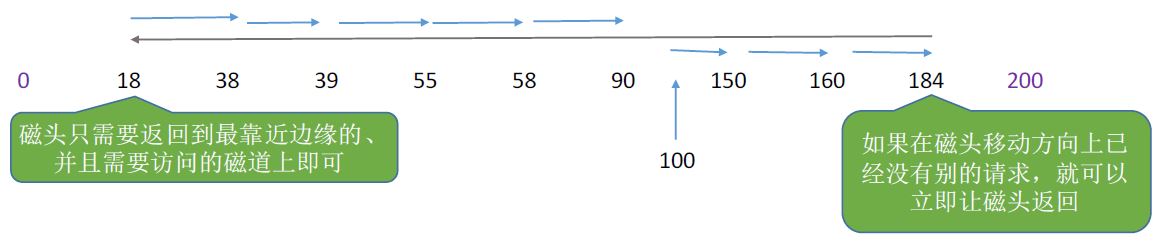
磁头总共移动了 (184-100) + (184-18) + (90-18)= 322 个磁道
响应一个请求平均需要移动 322/9 = 35.8 个磁道(平均寻找长度)
优点:比起C-SCAN算法来,不需要每次都移动到最外侧或最内侧才改变磁头方向,使寻道时间缩短
2.2.7 小结